Year: 2016 Location: Bristol, UK
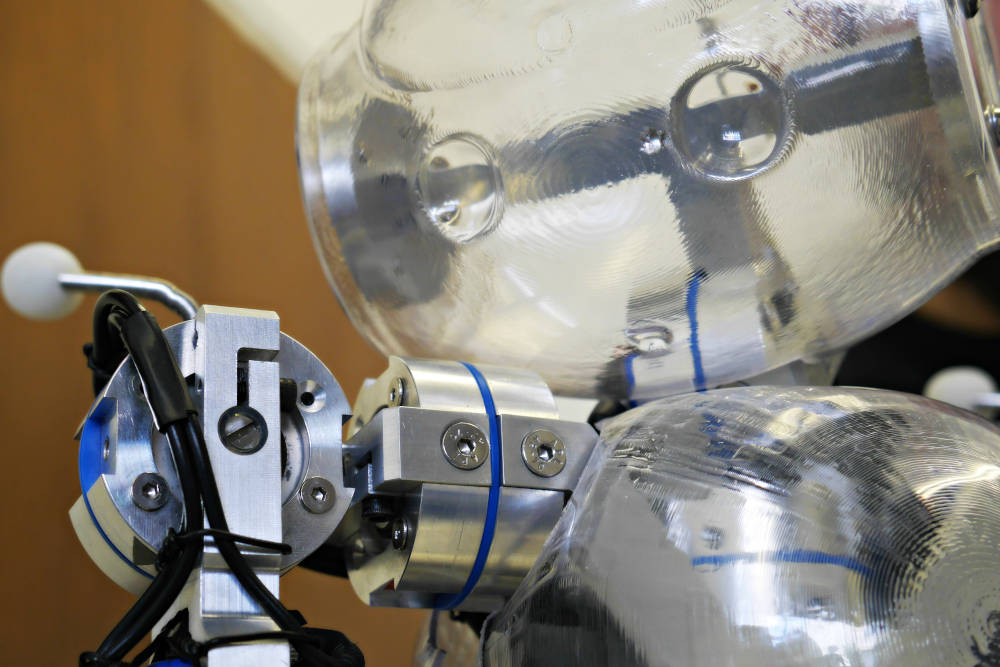
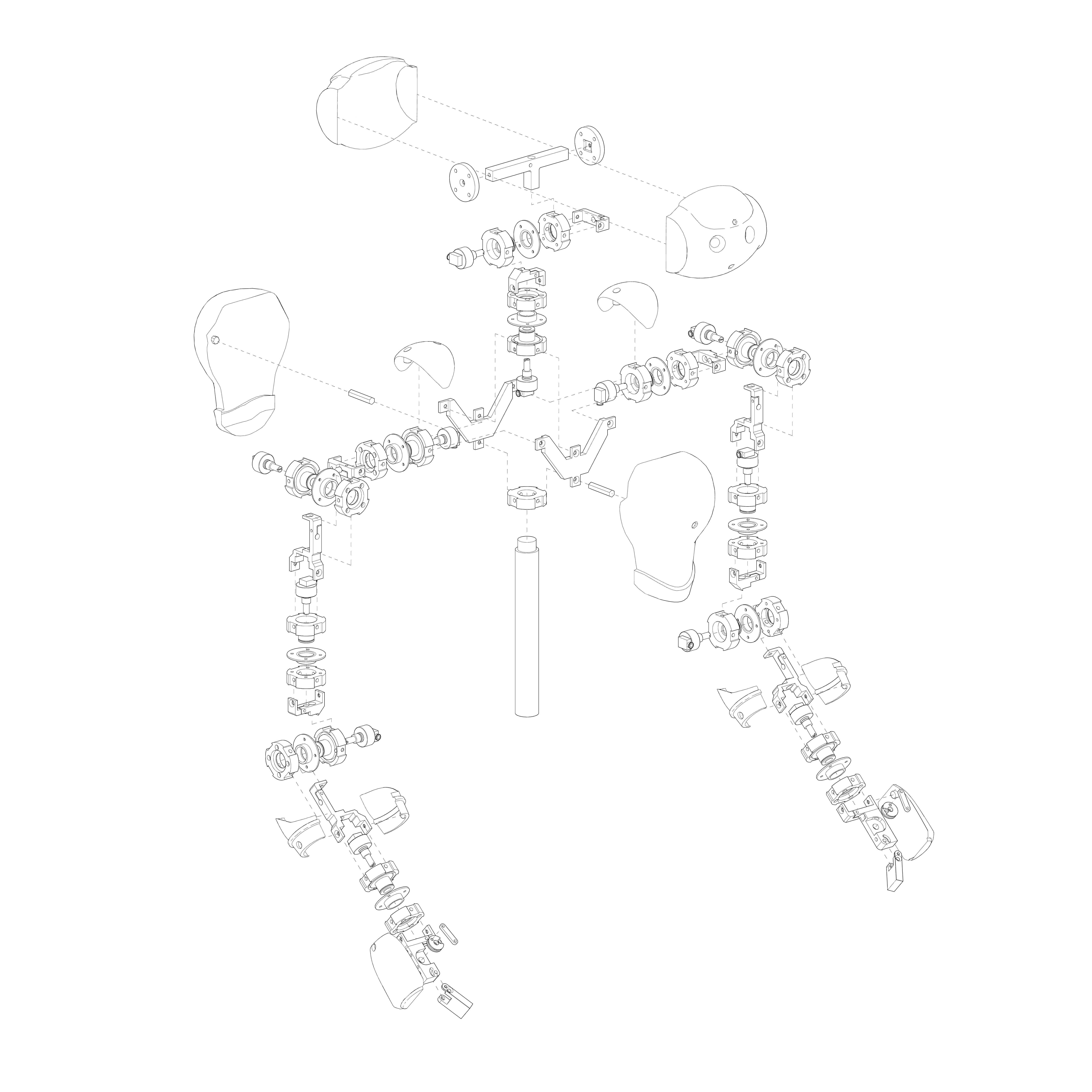
Working with researchers in Telepresence Robotics from the Bristol Robotics Laboratory and Bath University, the world of puppetry was explored as a means of investigating how to express the complexity of human mannerisms through an Aldebaran Nao Humanoid Robot.
Background
An eighteen degree of freedom motion capture rig was designed to provide the ability to tele-puppeteer a Nao robot. Providing a comparison between the raw skeletal data gathered from a teleoperator and the puppeteers’ interpretation of the teleoperator’s mannerisms and gestures, working within the limitations of the robot’s movement range.

| |
 |
 |
 |
 |
 |
 |
 |
Credits
Designed by RustySqiud in collaboration with researchers in Telepresence Robotics from the Bristol Robotics Laboratory and Bath University. Supported by the Engineering and Physical Sciences Research Council and Bristol Watershed.
| Team Leader and Creative Director | David Mcgoran |
| Production and Event Manager | Emma Dyer |
| Natasha Rosling | |
| Robotics Engineer | Robert Stephenson |
| Software Engineer | Zak Wilcox |
| Technical Designer and Fabricator | James Gates |
| Visual and Experience Designer | Helen White |
| Fabrication Support | Kyle Hirani |
| Lizzie Johnson | |
| Event Support | Charlotte Bizsewski |
| Nicholas Willsher | |
| George Rumney | |
| Film and Media | Adam Laity |
| Sophie Shaw |



| ← | ☰ | → |